Convincing Features

Assignment Type
Subject
Uploaded by Malaysia Assignment Help
Date
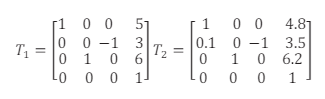
Question 1 [30%]
The initial location and orientation of a robot’s hand are given by �”, and its new location and orientation after a change are given by �#.
a) Construct a transformation matrix Q that will accomplish this transform (in the Universe frame).
b) Assuming the change is small, determine a differential operator that will do
the same.
c) By inspection, solve the differential translation and a differential rotation that constitute this operator
Question 2
Figure 1(a) and (b) shows a robotic arm used in automotive industry for painting and welding application. Based on the figures:
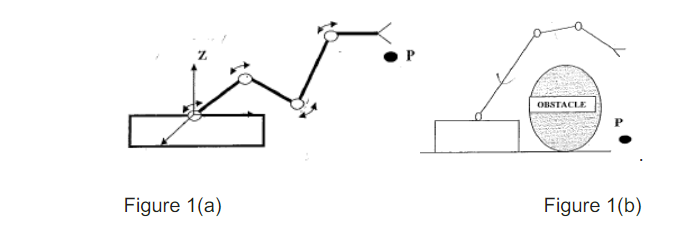
a) State number axes rotation
b) Degree of Freedom (DOF) in world space
c) Sketch any three (3) ways by which the robot can reach point P
Stuck in This Assignment? Deadlines Are Near?
Seeking help for TME303 Automation and Robotics assignments task? Discover our reliable online assignment helper for all Malaysian students, along with specialized dissertation help Malaysia. Achieve excellence in Automation and Robotics studies with our tailored assistance.